
Introduction and Problem Overview [00:00:02]
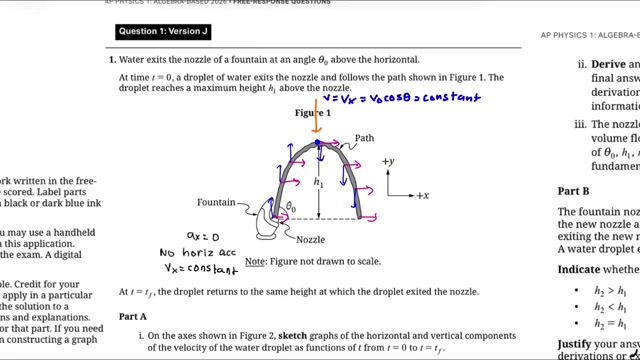
Speaker1: In this video, we are going to go over the 2026 version J FRQ solutions for AP Physics One, which were the Eastern Time Zone questions that were given out. For our first FRQ, water exits the nozzle of a fountain at an angle of theta initial above the horizontal at time equals zero. A droplet of water exits the nozzle and follows the path shown in Figure One. The droplet reaches a maximum height h one above the nozzle. We have projectile motion because our water is going to exit into air, so we are not going to use Bernoulli for this problem. Our velocity is v x equals v initial cosine theta, and that is going to be constant throughout our entire motion. That is going to be our total velocity at the very top of our projectile motion because at that point v f equals zero. We have a separation of vertical and horizontal components. We want to analyze those separately. We also have a x equals zero. v x is constant. There is no horizontal acceleration. a x equals zero because the change in velocity is zero in the horizontal direction.
Part A: Graphing Velocity Components [00:01:34]
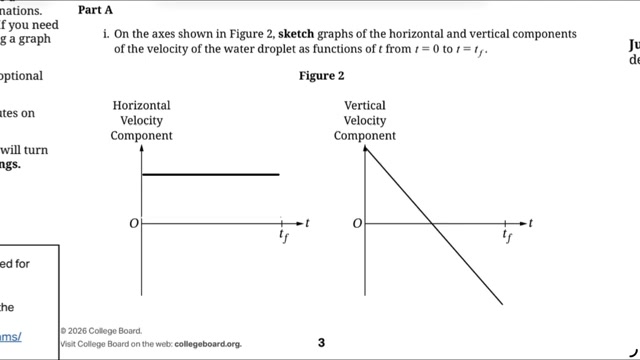
Speaker1: For part A, we are asked on the axes in Figure Two to graph the horizontal and vertical components of the droplet's velocity as a function of time from t equals zero to t equals t f. For your horizontal vertical component, it is going to be a constant value that does not change because that horizontal velocity is what keeps moving our droplet forward. We have a vertical velocity component that starts off positive and then transitions to negative. At first, you go upwards, then you reach your maximum point, and at that maximum point, you start shifting and going downwards. You have downward velocity. It is a vector, so it must account for direction.
Part B: Deriving Exit Speed [00:03:12]
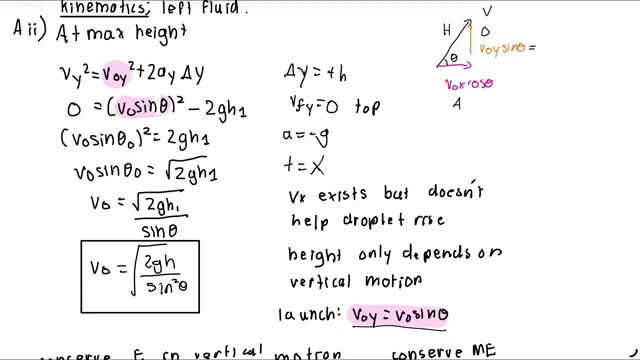
Speaker1: For our second part, we are asked to derive an expression for the speed of the water exiting the nozzle. For the exit speed, we can use different approaches. First, let us talk about kinematics. We look at our maximum height. We list our variables: the change in y of the water droplet is h, v f at the top is zero, acceleration is negative g everywhere on Earth, and time is x. v x exists but does not help our droplet rise because we only look at v initial based on vertical motion. At launch, v initial y equals v initial sine theta. If you have your velocity vector here, you can break it into components: v initial x cosine theta and v initial y sine theta. Relating this angle theta using trigonometric ratios, the opposite side is the hypotenuse, the adjacent is the hypotenuse. We take v initial y and substitute it with v initial sine theta. We have change in y, a y (gravity), and t x. We do not need x right now. We have everything we need. We square both sides and take the square root for root two g h one. Then v initial equals the root of two g h one over sine theta. We moved sine squared theta out, so we get sine theta instead.
Alternative Approach: Conservation of Energy [00:04:15]
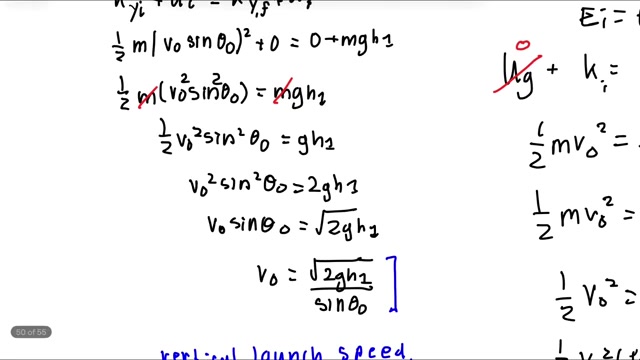
Speaker1: Another approach is conservation of energy. We have k y initial plus u initial (gravitational initial) equals k y f plus u f. That is one half mass times velocity initial sine theta initial squared plus zero, because we have zero gravitational potential energy at the beginning. Then we have zero k y f and m g h one at the top. We cancel out the m's. We have one half v initial sine squared theta initial equals g h one. v initial squared sine squared theta initial equals two g h one. v initial sine theta initial equals root of two g h one. We get the exact same expression. This is our vertical launch speed, not our total launch speed. We can also do this with conservation of mechanical energy again, but instead use v initial cosine theta. We have u g equals zero plus k initial. We have kinetic energy in the x direction at the top and u g. So one half m v initial squared equals one half m v x component squared plus m g h. One half m v initial squared equals one half m times v initial cosine theta squared plus m g h. We simplify. We take one minus cosine squared theta initial and replace it with the Pythagorean identity: sine squared theta initial equals one minus cosine squared theta initial. Then we multiply both sides by two and cancel.
Clarification on Energy Conservation [00:05:31]
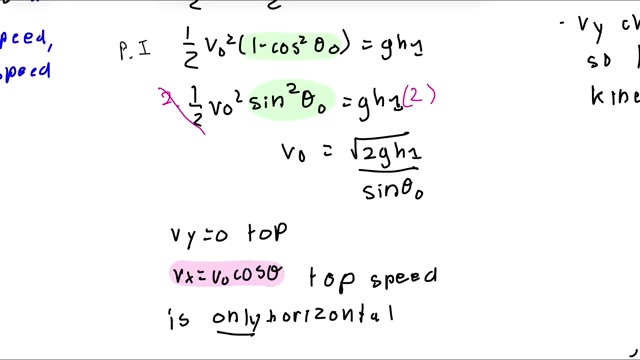
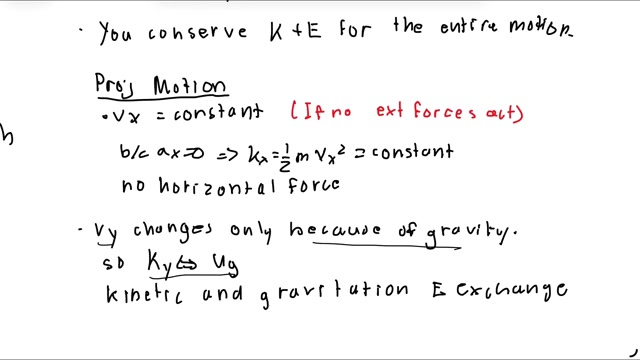
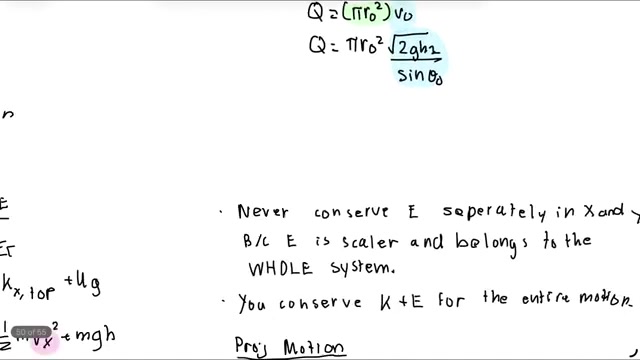
Speaker1: v y is zero at the top. v x equals v initial cosine theta. That makes our top speed only horizontal when we are at our peak. That is why we only use v x equals v initial cosine theta for kinetic energy at the top. Note that you should not conserve energy separately in x and y because energy is a scalar and belongs to the entire system. The reason we could only look at v initial sine theta is because in projectile motion, v initial sine theta equals v y, and v y changes only due to gravity. We have conversion of k y to u g, so kinetic and gravitational energy swap as we continue through projectile motion, and v x is constant. That is the case for projectile motion because we have no external forces acting. a x equals zero, so k x equals one half m v x squared, which is constant. We have no horizontal forces.
Part C: Volume Flow Rate [00:06:32]
Speaker1: For our next question, we are asked: the fountain nozzle is replaced with a new nozzle. Actually, we had part three first. Our nozzle has a circular cross-section with radius r initial. Derive an expression for the volume flow rate of the water exiting the nozzle. We want to derive our answer in terms of these variables. For this question, all you had to do was use Q equals A V, the volume flow rate equation on your formula sheet. You also had to realize that the pipe or flow was a circle, a hole like that. So area equals pi r squared of the circle. You take your area formula and substitute it in for A. We just found what v initial was in part one: root two g h one over sine theta initial. We got this multiple times. You plug that in and get this expression for Q. That is all you had to do.
Part D: Comparing Heights with New Nozzle [00:07:32]
Speaker1: For your third part, we are asked: the fountain nozzle is replaced with a new nozzle with a radius smaller than r initial. The water exits the new nozzle at the same theta initial above the horizontal, so the same angle. The volume flow rate of the water exiting the new nozzle equals the volume flow rate of the water exiting the original nozzle. A water droplet exiting the new nozzle reaches a maximum height of h two above the nozzle. We want to indicate whether h two is greater than, less than, or equal to h one by writing one of the following. We have this nozzle, and we change the radius to a smaller one. We want to figure out the change in height reached. To solve this, our answer is that the new height is greater than the old height. We start with the fact that volume flow rate must be the same. So Q one equals Q two, and Q equals A V. So A one V one equals A two V two. This is the continuity equation, which is constant. We remember we still have circles. So we have areas pi r squared on either side. In our first scenario, we are decreasing the radius. In the original, Q is constant. Let us focus on the right side. If we decrease the radius, that decreases the area, and we must increase velocity to compensate because the entire Q expression must be constant. We have the same Q on either side, so that results in increasing V. We also have the same launch angle, so V two y equals V two sine of theta initial. The vertical component of velocity increases because we have an increased V two. Let us go over everything we have to maintain. We have the continuity equation: if we increase one variable, we must decrease another. We also know that water exits into air, so atmospheric pressure equals the pressure at the nozzle because it exits into the atmosphere. That is the same in both. Overall, we decrease the radius, which decreases the area. Decreasing the area increases V by the continuity equation for the same flow rate. Increasing V increases kinetic energy because kinetic energy is one half m v squared, and kinetic energy and V are directly related.
Relationship Between Velocity and Height [00:10:41]
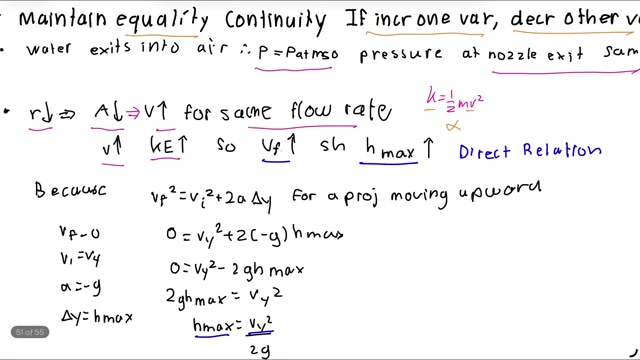
Speaker1: If v f increases, that increases h max because of a direct relationship. We can see this in the kinematics equation: v f squared equals v initial squared plus two a delta y. We list variables: v f equals zero at the top, v initial equals v y, acceleration is negative g, and delta y is h max. We substitute everything in. v f equals zero. v initial equals v y, and we have negative g. We substitute in h max and simplify. We get h max equals v y squared over two g. What is important is that h max is directly proportional to v y. That is a direct relationship. Increasing velocity increases the maximum height the projectile reaches. Since the water is launched at a higher vertical speed, the droplet has greater kinetic energy, and that greater kinetic energy causes a higher height to be reached than in the old scenario. The new kinetic energy is converted into gravitational potential energy, which helps launch into the air. The water has no choice but to exit faster because we have a smaller cross-sectional area. Decreasing that cross-sectional area forces the same amount of water to flow through less area, so the water exits faster, giving it a larger vertical velocity and therefore a larger h max.
Question 2: Collision of Discs [00:11:48]
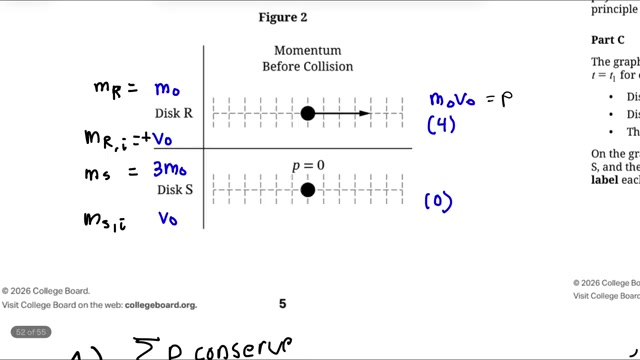
Speaker1: For Q two, two small discs R and S are on a straight horizontal track. At time t equals zero, disc R of mass m initial is located at position x zero. Disc R is initially moving with speed v initial in the positive x direction. Disc S of mass three m initial is initially at rest, as shown in the top view in Figure One. At time t equals one, the discs collide. Immediately after the collision, disc R moves with a speed of one half v initial in the negative x direction. In our post-collision image, disc R (mass m initial) moves in the negative x direction, and disc S (mass three m initial) moves with v equals three over two m initial v initial, which we will derive. Initially, disc S was at rest, and disc R was the only one moving with velocity. For part A, the momentum vector diagram in Figure Two represents the momentums of disc R and disc S before the collision. The mass of disc R is m initial, and its initial velocity is positive v initial. Multiplying them together, m initial times v initial gives momentum equal to four. For disc S, mass is three m initial, and its velocity is v initial. Multiplying v initial (which equals zero) gives momentum of zero.
Part A: Momentum After Collision [00:13:36]
Speaker1: For our next question, we are asked to draw arrows on Figure Three to represent the momentum vectors of disc R and disc S after the collision. Each arrow must go on or point away from each dot. We know that the final velocity of disc R is negative v initial over two. It still has the same mass m initial. Multiplying to find momentum gives one half m initial v initial, but it is negated and flipped in direction, pointing to the left. We take our previous momentum (four), divide by two, and flip direction to the left. Conservation of momentum applies in all collisions. Therefore, whatever momentum disc S has must compensate so that the net momentum is exactly the same. Disc S will have six going in the right direction because it must add up to four. Negative two plus positive six equals four. We can see this by deriving it. Conservation of momentum: total momentum equals m initial v initial. For R, we have m initial v initial. For S, we have three m times zero, which cancels out. Finally, we have R f and S f. We have m initial times negative one half v initial. So m initial v initial equals negative one half m initial v initial plus S final. Isolating for S final gives m initial v initial plus one half m initial v initial, which is two over two, resulting in three over two m initial v initial. That is how we got three over two for disc S moving in the positive direction.
Part B: Kinetic Energy of Disc S [00:14:55]
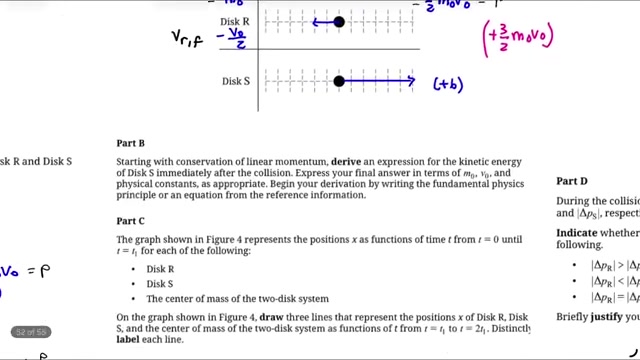
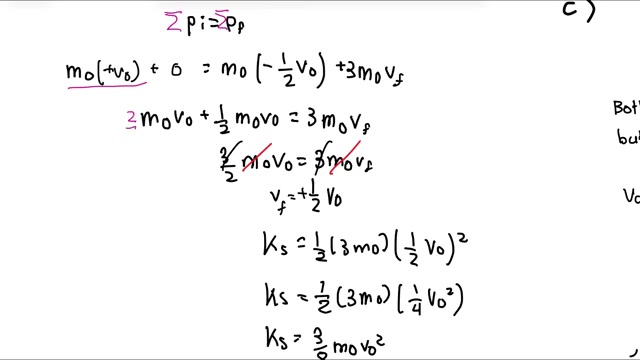
Speaker1: For our next part, we are asked: starting with conservation of momentum, derive an expression for the kinetic energy of disc S immediately after the collision. Express your answer in terms of m initial, v initial, and physical constants as appropriate. For part B, we have conservation of momentum. Summation of initial equals summation of final. We have m initial plus v initial. It was at rest. m initial times negative one half v initial plus three m initial v f. m initial v initial plus one half m initial v initial equals three m initial times v final. Adding two over two gives three over two m initial v initial equals three m initial v final. We get positive one half v initial multiplied by v initial equals v final. To get k S, we take that velocity and substitute it in: one half times three m initial times one half v initial squared. We take the square: two squared and v initial squared. Kinetic energy equals three over eight m initial times v initial squared.
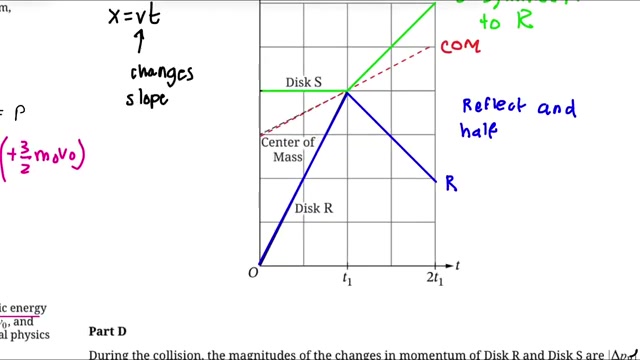
Part C: Graphing Positions [00:16:26]
Speaker1: For part C, we are asked: the graph shown in Figure Four represents the positions as functions of time from t equals zero until t equals one for each disc R, disc S, and the center of mass of the two-disc system. We want to draw lines representing the positions x of disc R, S, and the center of mass from these intervals. We label each line. Position equals velocity times time. Slope equals velocity. We are graphing the velocities of these objects. The center of mass is a straight line and remains the same despite the collision because collision forces are internal to the system. They do not change the overall center of mass because internal forces cancel out perfectly, resulting in no net change. The center of mass continues like that, which is constant in any closed system. Both discs move at the same velocity but in opposite directions. We can see this in the v center of mass equation: m r v r plus m s v s divided by total mass. Plugging in values: m initial v initial plus three m initial times zero equals one over four v initial. On the graph, the center of mass is the same. It continues the line. For disc R, it reflects and becomes half of its previous value. It reflected direction and was halved. For disc S, it went up to six, so it is symmetric to R. They have the same velocity but in opposite directions, so we do a direct reflection of R.
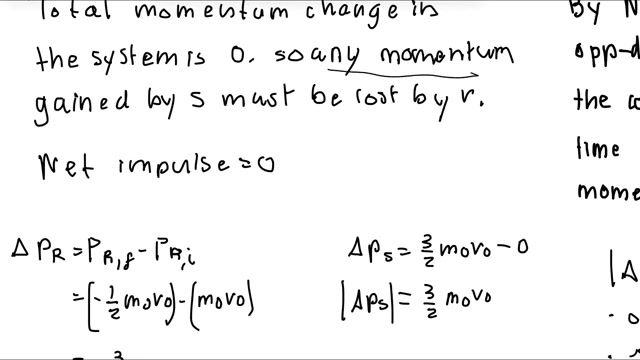
Part D: Change in Momentum [00:19:17]
Speaker1: For part D, we are asked: during the collision, the magnitudes of the changes in momentum of disc R and disc S are compared. We want to indicate whether the magnitude of change in R is greater than, less than, or equal to the magnitude of change in S. The changes in momentum are the same as each other because they occur over a very short period of time, so the change in time is negligible. Also, by Newton's third law, the discs exert equal magnitude, opposite forces on each other during the collision. Since the forces act for the same time interval (the discs are in contact for the same amount of time), the changes in momentum are equal in magnitude. The change in momentum is m delta v equals f delta t. They are launched in opposite directions. This is a short collision, so the change in momentum is negligible. The same force by Newton's third law means the impulses are equal but opposite. F R on S equals negative F S on R, and that cancels in the two-disc system. We can check this: the momentum gained by S is lost by R, so the net impulse is zero. Taking the change in momentum for both: momentum R f minus momentum R initial gives negative one half m initial v initial minus m initial v initial, which is negative three over two m initial v initial. Its magnitude is three over two m initial v initial. For disc S, final momentum is three over two m initial v initial, and initial is zero, so the change is three over two m initial v initial. This matches perfectly. They have the same magnitude but opposite directions, exactly a Newton's third law pair. So the answer is that they are equal for part D.
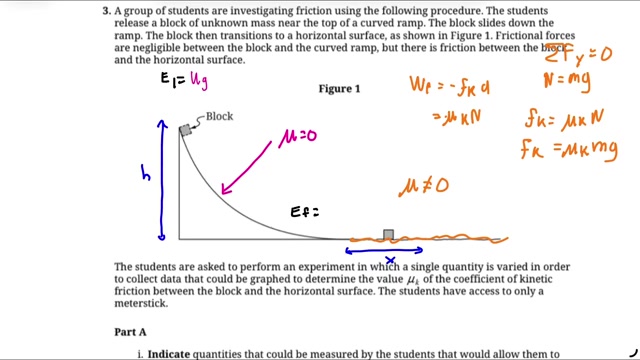
Question 3: Experimental Design - Friction [00:21:02]
Speaker1: For our third question, this was the experimental design one. Let us read it. A group of students are investigating friction using the following procedure. The students release a block of unknown mass near the top of a curved ramp, and the block slides down the ramp. The block then transitions to a horizontal surface as shown in Figure One. Frictional forces are negligible between the block and the curved ramp, but there is friction between the block and the horizontal surface. Immediately, you can realize that energy at the top equals U G. Down here, you have kinetic energy. On this ramp, there is no friction, and we can measure the height you drop it at with h. When it is down here, we measure the distance it moves beyond the bottom of the incline as x. Since this section has friction, work is done by friction. Work equals f times d, where force is parallel. Negative f k acts opposite to displacement. f k equals mu coefficient of friction (since it is moving) times normal force. For any block on a surface, the sum of vertical forces is zero, so normal force equals m g because the block is not going through the surface or flying off. It is perfectly supported. Substituting, f k equals mu k times n, so f k equals mu k times m g.
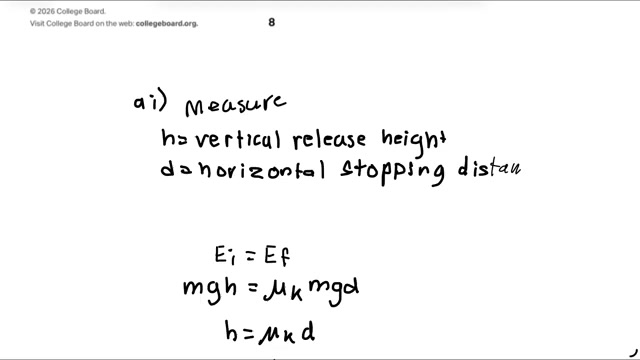
Part A: Measuring Coefficient of Friction [00:22:31]
Speaker1: First, for part A, we are asked: the students are asked to perform an experiment in which a single quantity is varied to collect data that could be used to determine the coefficient of friction between the block and the horizontal surface. The students have access to only a meter stick. This is tricky because they have just a meter stick. We first indicate the quantities that could be measured by the students that would allow them to determine mu k using a linear graph. We also describe a method to reduce experimental uncertainty for the measured quantities. For part A, we say we measure the vertical release height and d. We measure the horizontal stopping distance, the distance the block travels after reaching the bottom point of the curved incline. We get our equation for the coefficient of friction by setting energy initial (at the top) equal to m g h (U g) equal to energy final, which is the work done by friction. The force of friction f k equals mu k times m g, and we have it times displacement d. After this, we cancel out mass and gravity. We are left with h equals mu k times d. Rearranging for mu k gives mu k equals height divided by distance traveled at the bottom.
Reducing Experimental Uncertainty [00:24:18]
Speaker1: To reduce experimental uncertainty, we can repeat each trial several times for different values of h. We change the height and drop the block down the incline. We get those values and average the stopping distance. If we have many trials, we reduce random error. Also, we can carefully measure the vertical height and stopping distance with a meter stick at eye level to reduce parallax error and measurement uncertainty. We can also use the exact same release point as a control, meaning we release it from the very same edge of the incline.
Part B: Graphing for Linear Relationship [00:25:20]
Speaker1: For part B two, we are asked to indicate which quantities the students could graph on horizontal and vertical axes to create a linear graph that could be used to determine the coefficient of friction. We clearly state which quantity will be graphed on each axis. For part two, we describe the relationship between mu k and a feature of the graph from part B. Our answer can include an equation relating mu k with the chosen feature. For B one, we have height equals mu k times d. We can graph this as y equals m x, with b equals zero. The slope of the graph of h versus d is equal to mu k. At the top, we have gravitational potential energy, u g m g h. At the bottom, when it stops, we have work done by friction. We set them equal to each other. This is how we derive the equation using work equals f d.
Sub-Experiment: Rough Ramp [00:27:06]
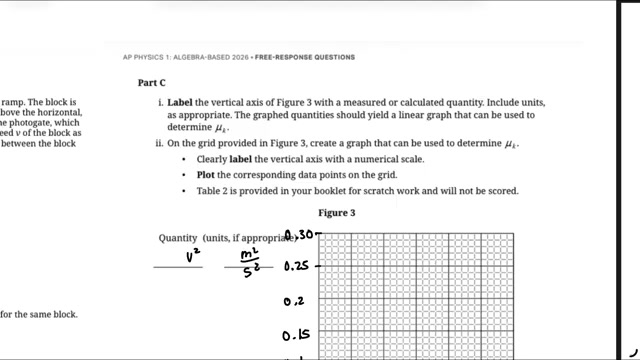
Speaker1: For our next part, we are asked to label the vertical axes of Figure Three with measured or calculated quantities or units, including units. We create a best-fit line. We were provided with an equation for a second sub-experiment. In a different experiment, the students release a block from rest on a rough ramp. The block is released at a distance d from the photogate, and the ramp is inclined at an angle theta above the horizontal, as shown in Figure Two. The block slides down the ramp and passes through the photogate, which is positioned near the bottom of the ramp. The photogate determines the speed v as it passes through. The unknown coefficient of friction between the block and the ramp is mu k. The experiment is repeated several times with different release distances d for the same block. Table One shows the values of d and v. I squared our values of v and got approximate values for v squared. Squaring v squares m and s, so those are our new units. The students correctly determine that the relationship between d and v is given by v squared equals two g times sine of theta minus mu k times cosine of theta times d, where the angle of inclination is thirty degrees. The students want to determine the coefficient of friction. They create a graph with d plotted on the horizontal axis. We want to label the vertical axes with our measured or calculated quantity. That is v squared equals m squared over s squared because we make our slope equal to this entire expression. It is convenient because we have this as m and d on the outside, and they already graphed d on the x-axis. It is easy to determine that slope is everything else multiplied by it.
Calculating Slope and Mu k [00:28:52]

Speaker1: For our v squared values, we use equal intervals of about 0.05 to encapsulate all data. We take these points and graph them, creating a line of best fit between two points. We take two points on the actual graph that are approximations for our best-fit line. Those are the actual points we use to calculate slope. Slope is change in y over change in x. Using those two points, point two and point one, we have a slope of 0.47. We plug into this formula any points on this line, but I chose these two points in blue. We have 0.47 equals m, our definition of slope. We set slope equal to 0.47 and solve for the coefficient of friction inside the definition of slope.
Solving for Mu k [00:30:04]
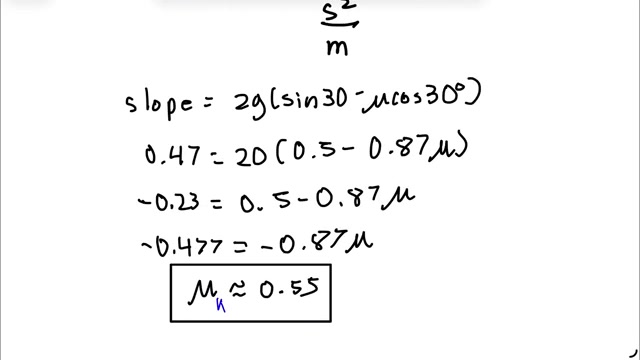
Speaker1: Now we have 0.47 equals two g times sine thirty minus mu k sine thirty degrees. We multiply two times ten and get 0.5. Simplifying, we get mu k equals 0.55 after dividing both sides by negative 0.87. You could also use Desmos and this equation, but you could also experimentally calculate your value of m. Remember, when you calculate m, you do not use experimental values. You always use values on the best-fit line. That is it for this question.
Question 4: Rotational Dynamics [00:31:24]
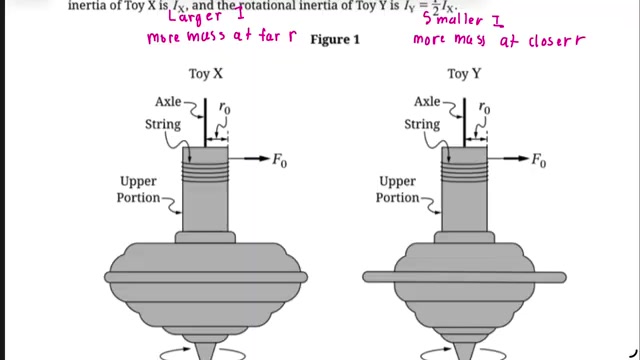
Speaker1: For question four FRQ, we have toys X and Y that are free to rotate with negligible friction around a vertical axle through the center of each toy. The upper portion of each toy has a radius r not, as shown in the side view of Figure One. A string of length l not is completely wrapped around the upper portion of each toy. The rotational inertia of toy X is I X, and the rotational inertia of toy Y is I Y, one half of I X. In toy X, we have a larger radius compared to toy Y. That means more mass is located farther from the center, which is the axis. More mass away from the pivot results in larger inertia because it is more difficult to rotate if all mass is far away. Toy Y has a smaller I because more mass is closer to the center. Both toys are initially at rest. A constant horizontal force of magnitude F naught is exerted on the string of each toy, causing the toys to rotate, as shown in the overhead figure. The axle remains vertical as the force is exerted, and the strings do not slip. When the string loses contact with the axle of toy X, the angular speed is omega X. When the string loses contact with toy Y, the angular speed is omega Y. We have torque because of the force and movement. We can immediately think of torque: R F sine theta. Sine theta is 90 degrees, so it is one. Torque is R F. This torque is the same for both toys because we have the same torque and same force, but R is different. Omega Y is greater than omega X. This is because we have a constant radius and the same angle (90 degrees). The one that is easier to rotate has smaller inertia. Torque causes rotation, and the torque for both is the same. The same force is applied over the same length of string, so the work done on each toy is the same. Toy Y has smaller rotational inertia, so it has larger angular acceleration and reaches greater speed. Torque equals I times alpha. With the same torque, increasing inertia decreases alpha, and decreasing inertia increases alpha. This compensates to maintain the same torque.
Alternative Approach: Work-Energy Theorem [00:33:01]
Speaker1: Another approach: work equals torque times change in time. The work done on each toy is the same. With the same work, you have the same kinetic energy because work equals delta K (work-energy theorem). Kinetic energy equals one half I omega squared. K is constant, so increasing inertia decreases omega. Decreasing inertia increases omega, which is why omega Y is greater than omega X. One thing you should not have done on this FRQ was say angular momentum is conserved because it was not conserved. We had an external torque acting on the toy from pulling the string. Initial angular momentum is not equal to final. If you said this as reasoning, it was not right. Angular momentum is conserved only when external torque is zero, such as a spinning skater pulling arms inward, collisions with no external torque, planets orbiting the sun, or rotating platforms.
Part B: Deriving Angular Speed [00:34:30]
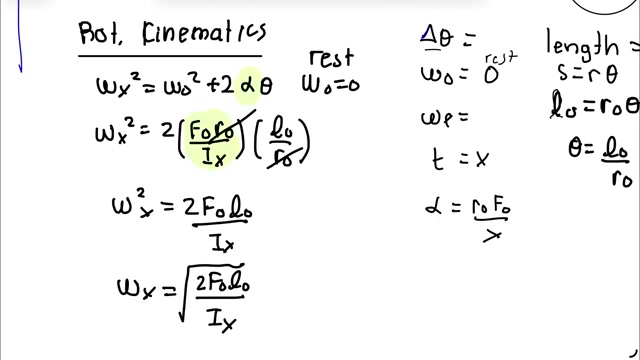
Speaker1: For our next part, we are asked to justify how you derived your equation. We have part B first. Start with the work-energy theorem or Newton's second law in rotational form and derive the expression for the angular speed omega x of toy X at the instant the string loses contact with the axle. Express your final answer in terms of these physical constants. We start with two different approaches. The work-energy theorem approach is quickest: work equals delta K. Work equals force times displacement, which is L. Delta K is one half inertia x omega x squared. We started from rest, so that is zero. We have two F initial L initial equals one half x omega squared x. Multiply both sides by two to cancel one half. Omega x equals the square root of two F initial F not F not L not divided by I x. The second approach uses Newton's second law. Summation of torque equals I times alpha. We have constant torque, so F not R not equals I x alpha. Alpha equals F not R not over I x. The string does not slip, so the length pulled off is related to angular displacement. We use rotational kinematics. We list variables: delta theta is not given, omega initial is zero (started from rest), omega final is unknown, t is x, and we found alpha. One thing weird about this question was that theta was not given, so we had to get theta. In circular motion, the sector has theta traveled. To find the sector, multiply radius by theta. That sector was L initial, so L initial equals R initial theta. Solving for theta gives L initial over R not. We take the kinematics equation: omega x squared equals omega squared plus two alpha theta. We substitute alpha and theta. We cancel one of the Rs and get omega x squared equals two times F not L not divided by I x. Taking the square root gives the same answer using two different methods.
Part C: Consistency with Reasoning [00:37:33]
Speaker1: For our final part, part C, we are asked to answer how we derive the equation in part B and if it is consistent with our reasoning in part A. Our answer is consistent and matches because the equation shows that angular speed is inversely related to the square root of rotational inertia. Angular speed is inversely related to the square root of rotational inertia. I is in the denominator under the square root. Toy Y has smaller rotational inertia than toy X, so toy Y must have larger angular speed. If you increase one, it decreases the other. I x is greater than I y, and omega x is less than omega y because I is in the denominator. Additionally, we can use this as second reasoning: K was constant, and I increased. If I increases, omega decreases. If I decreases, omega increases. It makes sense.